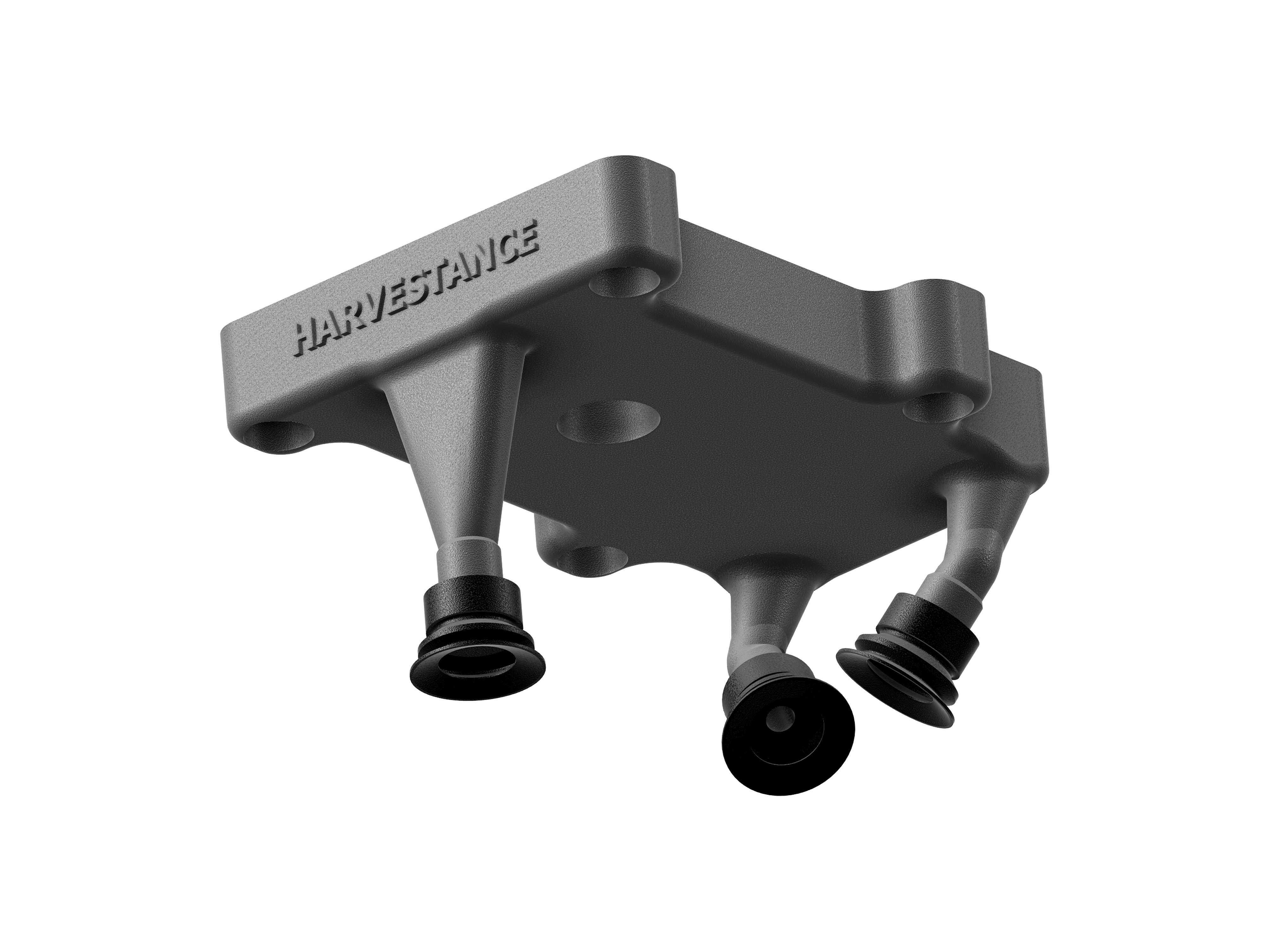
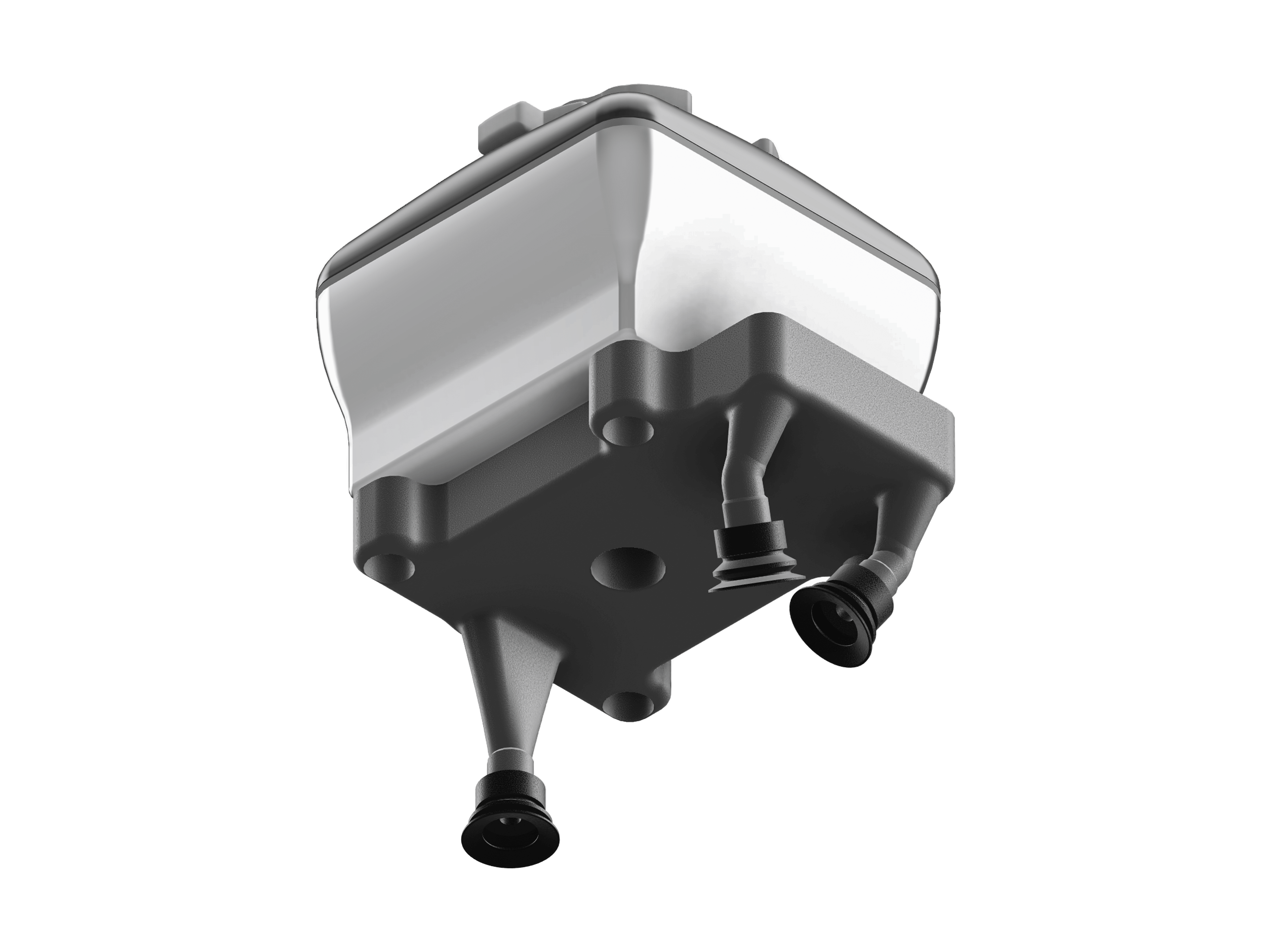
Vacuum Gripper for Shoe Trees
Gripper
%204-3.png)
- Customer: Japanese Omron Robot Systems Integration Company
- Development Period: Approx. 4 days (incl. 3D scanning, design, and testing)
- Manufacturing: 3D Printing (High-Strength Composite Material)
- Weight (incl. suction cups and bolts): 117g
- Application: Demonstration purposes
- Designed a customized gripper, considering the suction position, to securely handle curved workpieces such as shoe trees.
- Designed for compatibility with the customer's existing vacuum pump-integrated gripper, enabling the custom gripper to be mounted beneath the current gripper in use.
- Designed built-in vacuum channels within the gripper for convenient use with connecting one-touch fitting and vacuum tubes.







%204-3.png)
%204-3.png)
%204-3.png)